ラジアン を含むイラストが 27 件見つかりました ( 1 - 20 件目を表示 ) タグで検索






やっとペン入れ終了しました( ´∀`)bグッ! 生放送で絵を描いてます(*´ω`*)良かったら来てくださいヾ(*´∀`*)ノキャッキャ→co1477115
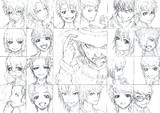
現実は崩壊した。 ようこそ、御伽の世界へ。 だいぶタイミングがズレてしまいましたが、昨年お世話になった方達に僕からの感謝の気持を込めて、オリジナルストーリーに登場するキャラクターとして、僕が持っていた勝手なイメージで描かせて頂きました。 左から順に 1列目 らじあんさん、デールさん、バヤシさん、アニキさん、キラードールさん、間取りさん 2列目 あかどさん、狼マヨネーズさん、真希さん、月夜神鈴音さん 3列目 眠りたがりさん、おてもさん、ぽむぽむさん、美味桜さん 4列目 専属アンチさん、とどさん、Yutakaさん、風太さん、ふもふもさん、そくたつさん 真ん中 ROM専の方々 ※以前にイメージイラストが描いてある方、またはアイコンなどで長い間固定されたイメージイラストがすでに有る方は、それらを参考に僕なりのタッチで描かせて頂いております。 また、描ける人数に限りもありますので、放送によく来てくれて、絡んでくれた方を中心に描かせて頂いております(絡まなければ最低限のイメージが沸かないため)ので、ご了承下さい。 昨年お世話になった方々、本当に有難う御座います!!こんな僕らではありますが、是非今年もまたよろしくお願い致します!!m(__)m

ニコラジはwktkの枠とラジアンを応援しています ってことで、レー天狗期間を迎えるにあたって、新しいテー天狗様を描いてみました。 こんな感じでどうでしょう?



他の方からの提案で、メガネ付きバージョンも用意させて頂きました(*´∀`) 生放送で絵を描いてます(*´ω`*)良かったら来てくださいヾ(*´∀`*)ノキャッキャ→co1477115

遅くなりましたが、やっと完成致しました!! 下描きの時にも書きましたが、改めてどれが誰なのか書いておきます。 皆さん、昨年は大変お世話になりました!! こんな僕らではありますが、今年も宜しくお願い致します(`・ω・´)ゞ 左から順に 1列目 らじあんさん、デールさん、バヤシさん、アニキさん、キラードールさん、間取りさん 2列目 あかどさん、狼マヨネーズさん、真希さん、月夜神鈴音さん 3列目 眠りたがりさん、おてもさん、ぽむぽむさん、美味桜さん 4列目 専属アンチさん、とどさん、Yutakaさん、風太さん、ふもふもさん、そくたつさん 真ん中 ROM専の方々 生放送で絵を描いてます(*´ω`*)良かったら来てくださいヾ(*´∀`*)ノキャッキャ→co1477115


ペン入れ終わりました(*´∀`) あとはらじあんさんのリクイラがペン入れまで終わりましたら放送開始しますヾ(*´∀`*)ノキャッキャ 生放送で絵を描いてます(*´ω`*)良かったら来てくださいヾ(*´∀`*)ノキャッキャ→co1477115

完成品>im8811453 どちらの方向に、どのくらいのスピードで動いてるかを 算出するモジュール。 ベースとして2つの座標を取り、その角度と距離を計算するR.I.N.G.を試作 取りあえず自機とプレイヤーの座標を取得させて計算。 (動きとしてはYaw視点追従と同じになる。) Atan2(X’-X,Z'-Z)で-3~3の角度が出てくる。 それを57.2958倍すると角度になる。 90度そっぽ向くので-90して対象の角度を出す。 距離は√((X’-X)二乗+(Z'-Z)二乗)なので 二値オペとでたのを、一値オペのSqrt(x)にぶっこむ。(平方根関数) これで計算と動作テストは完了。 次は5Tick空けて対象対象の座標を取得する仕組みを5つ作って、 1Tickぐらいで順繰りに見るのを変えてく様にする。 これと現在座標をくらべて5Tick前との座標差をだす。 1つにして5Tick更新でもいいけど、更新した直後に見に行くと 全く動いてない事になるしね。 あ、スケジュールR.I.N.G.つかって定刻で見に行けばいい1個でもいいのか。 両方試してみよう。 この加速度センサーが出来ると、数Tick後の相手座標をだしたり、 相手の進行方向に自分が居るか調べたり、 加速方向にスラスターの向きを変えたりなどできる。 Yaw値の場合機体の向きで進んでる方向と一致しないしね。 ↓一応配布 動きをみてみたいひとはどーぞ https://www.dropbox.com/s/sluvgjj8h5raqtk/Atan2xz_ring.txt?dl=0 ノード9:X距離 10:Z距離 11:角度だし 12:機体向き分角度相殺 13:ラジアン変換(57.2958倍) 14:-90度向き変え>15ロテタを進行方向(プレイヤー)に 16:X二乗 17:y二乗 19:√16,17で距離だし 20,21:距離の25%倍の長さにエクステンダーを伸ばす。 こんな流れ。